
Содержание
 Схема двигателя.
Схема двигателя.
Схема двигателя параллельного возбуждения изображена на рис. 1.25. Обмотка якоря и обмотка возбуждения включены параллельно. В этой схеме: I – ток, потребляемый двигателем из сети, Iя – ток якоря, Iв – ток возбуждения. Из первого закона Кирхгофа следует, что I = Iя + Iв.
Естественная механическая характеристика. Естественная механическая характеристика описывается формулой (1.6).
При холостом ходе М = 0 и nх = U/СЕФ.
Если Ф = const, то уравнение механической характеристики принимает вид:
Из (1.8) следует, что механическая характеристика (рис. 1.26, прямая 1) – прямая с углом наклона a и угловым коэффициентом b. Так как у двигателей постоянного тока Rя мало, то с увеличением нагрузки на валу частота вращения n изменяется незначительно – характеристики подобного типа называются «жесткими».
Ток, потребляемый двигателем из сети, практически растет пропорционально моменту нагрузки. Действительно, М » Мэм = См Iя Ф, и так как у двигателя параллельного возбуждения Ф = const, то Iя
Регулирование частоты вращения.
Регулирование частоты вращения возможно из (1.6) тремя способами: изменением магнитного потока главных полюсов Ф, изменением сопротивления цепи якоря Rя и изменением подводимого к цепи якоря напряжения U (изменение n за счет изменения момента нагрузки М в понятие регулирования не входит).
 Регулирование n изменением магнитного потока Ф осуществляется с помощью регулировочного реостата Rр. При увеличении сопротивления реостата ток возбуждения Iв и магнитный поток главных полюсов Ф уменьшаются. Это приводит, во-первых, к увеличению частоты вращения холостого хода nх и, во-вторых, к увеличению коэффициента b, т.е. к увеличению угла наклона механической характеристики. Однако b остается небольшим и жесткость механических характеристик сохраняется. На рис. 1.28 помимо естественной характеристики 1, соответствующей максимальному магнитному потоку Ф, приведено семейство механических характеристик 2-4, снятых при уменьшенном магнитном потоке. Из характеристик следует, что изменением магнитного потока можно только увеличивать частоту вращения относительно естественной характеристики. Практически частоту вращения таким методом можно увеличивать не более чем в 2 раза, так как увеличение скорости приводит к ухудшению коммутации и даже механическим повреждениям машины.
Регулирование n изменением магнитного потока Ф осуществляется с помощью регулировочного реостата Rр. При увеличении сопротивления реостата ток возбуждения Iв и магнитный поток главных полюсов Ф уменьшаются. Это приводит, во-первых, к увеличению частоты вращения холостого хода nх и, во-вторых, к увеличению коэффициента b, т.е. к увеличению угла наклона механической характеристики. Однако b остается небольшим и жесткость механических характеристик сохраняется. На рис. 1.28 помимо естественной характеристики 1, соответствующей максимальному магнитному потоку Ф, приведено семейство механических характеристик 2-4, снятых при уменьшенном магнитном потоке. Из характеристик следует, что изменением магнитного потока можно только увеличивать частоту вращения относительно естественной характеристики. Практически частоту вращения таким методом можно увеличивать не более чем в 2 раза, так как увеличение скорости приводит к ухудшению коммутации и даже механическим повреждениям машины.
Другой способ регулирования скорости связан с включением последовательно с якорем регулировочного реостата Rя.р (пусковой реостат Rп для этой цели непригоден, так как он рассчитан на кратковременный режим работы). Формула (1.6) при этом принимает вид:
n =  ,
,
откуда следует, что скорость при холостом ходе при любом сопротивлении Rя.р одинакова, а коэффициент b и, следовательно, наклон механических характеристик 5-7 увеличивается (рис. 1.26). Регулирование частоты вращения этим способом приводит к уменьшению частоты вращения относительно естественной характеристики. Кроме того, оно неэкономично, так как связано с большой мощностью потерь (Rя.р I ) в регулировочном реостате, по которому протекает весь ток якоря.
) в регулировочном реостате, по которому протекает весь ток якоря.
 Третий способ регулирования частоты вращения – безреостатное изменение подводимого к якорю напряжения. Он возможен только в случае, когда якорь двигателя питается от отдельного источника, напряжение которого можно регулировать. В качестве регулируемого источника применяются отдельные, специально предназначенные для данного двигателя генераторы или управляемые вентили (тиратроны, ртутные выпрямители, тиристоры). В первом случае образуется система машин, называемая системой Г-Д (генератор – двигатель), (рис. 1.27). Она применяется для плавного регулирования в широких пределах частоты вращения мощных двигателей постоянного тока и в системах автоматического управления. Система регулирования с управляемыми вентилями УВ (рис. 1.28) находит применение для регулирования частоты вращения двигателей меньшей мощности. Ее преимущество – большая экономичность.
Третий способ регулирования частоты вращения – безреостатное изменение подводимого к якорю напряжения. Он возможен только в случае, когда якорь двигателя питается от отдельного источника, напряжение которого можно регулировать. В качестве регулируемого источника применяются отдельные, специально предназначенные для данного двигателя генераторы или управляемые вентили (тиратроны, ртутные выпрямители, тиристоры). В первом случае образуется система машин, называемая системой Г-Д (генератор – двигатель), (рис. 1.27). Она применяется для плавного регулирования в широких пределах частоты вращения мощных двигателей постоянного тока и в системах автоматического управления. Система регулирования с управляемыми вентилями УВ (рис. 1.28) находит применение для регулирования частоты вращения двигателей меньшей мощности. Ее преимущество – большая экономичность.
Регулирование частоты вращения изменением U практически возможно только в сторону уменьшения, так как увеличение напряжения выше номинального недопустимо из-за резкого ухудшения коммутации. Из (1.9) следует, что при уменьшении напряжения уменьшается скорость холостого хода nх, а наклон механических характеристик 8-10 не изменяется (см. рис. 1.26), они остаются жесткими даже при низких напряжениях. Диапазон регулирования (nmax/nmin) таким способом 6:1-8:1. Он может быть значительно расширен при применении специальных схем с обратными связями.
Регулировочная характеристика.
Регулировочная характеристика n=f(Iв) двигателя параллельного возбуждения изображена на рис. 1.29.
Ее характер определяется зависимостью (1.5), из которой следует, что частота вращения обратно пропорциональна магнитному потоку и, следовательно, току возбуждения Iв. При токе возбуждения Iв = 0, что может быть при обрыве цепи возбуждения, магнитный поток равен остаточному Фост и частота вращения становится настолько большой, что двигатель может механически разрушиться, – подобное явление называется разносом двигателя.
Физически явление разноса объясняется тем, что вращающий момент (1.2) при уменьшении магнитного потока, казалось бы, должен уменьшиться, однако ток якоря Iя = (U – E)/Rя увеличивается значительнее, так как уменьшается Е (1.1) и разность U – E увеличивается в большей степени (обычно Е » 0,9 U).
 Тормозные режимы.
Тормозные режимы.
Тормозные режимы двигателя имеют место тогда, когда электромагнитный момент, развиваемый двигателем, действует против направления вращения якоря. Они могут возникать в процессе работы двигателя при изменении условий работы или создаваться искусственно с целью быстрого уменьшения скорости, остановки или реверсирования двигателя.
У двигателя параллельного возбуждения возможны три тормозных режима: генераторное торможение с возвратом энергии в сеть, торможение противовключением и динамическое торможение.
Генераторное торможение возникает в тех случаях, когда частота вращения якоря n становится больше частоты вращения при идеальном (т.е. при Мпр = 0) холостом ходе nx (n>nx). Переход в этот режим из режима двигателя возможен, например, при спуске груза, когда момент, создаваемый грузом, приложен к якорю в том же направлении, что и электромагнитный момент двигателя, т.е. тогда, когда момент нагрузки действует согласно с электромагнитным моментом двигателя и он набирает скорость, большую чем nx. Если n>nx, то Е>Uc (где Uc – напряжение сети) и ток двигателя изменяет свой знак (1.4) – электромагнитный момент из вращающего становится тормозным, а машина из режима двигателя переходит в режим генератора и отдает энергию в сеть (рекуперация энергии). Переход машины из двигательного режима в генераторный иллюстрируется механической характеристикой (рис. 1.30). Пусть в двигательном режиме a1 – рабочая точка; ей соответствует момент М. Если частота вращения увеличивается, то рабочая точка по характеристике 1 из квадранта I переходит в квадрант II, например, в рабочую точку a2, которой соответствует частота вращения n΄ и тормозной момент – М΄.
Торможение противовключением возникает в работающем двигателе, когда направление тока в якоре или тока возбуждения переключается на противоположное. Электромагнитный момент при этом изменяет знак и становится тормозным.
Работе двигателя с противоположным направлением вращения соответствуют механические характеристики, располагающиеся в квадрантах II и III (например, естественная характеристика 2 на рис. 1.30).
Внезапный переход на эту характеристику практически недопустим, так как сопровождается чрезмерно большим броском тока и тормозного момента. По этой причине одновременно с переключением одной из обмоток в цепь якоря включается добавочное сопротивление Rдоб, ограничивающее ток якоря.
Механическая характеристика режима с Rдоб имеет большой наклон (прямая 3). При переходе в режим противовключения частота вращения n в первый момент измениться не может (из-за инерционности якоря) и рабочая точка из положения a1 перейдет в положение a3 на новой характеристике. Из-за появления Мтор частота вращения n будет быстро падать до тех пор, пока рабочая точка a3 не перейдет в положение a4, соответствующее остановке двигателя. Если в этот момент двигатель не отключить от источника питания, то якорь изменит направление вращения. Машина начнет работать в двигательном режиме с новым направлением вращения, а ее рабочая точка a5 будет находиться на механической характеристике 3 в квадранте III.
 Динамическое торможение возникает в тех случаях, когда якорь двигателя отключается от сети и замыкается на сопротивление динамического торможения Rд.т. Уравнение характеристики (1.6) принимает вид:
Динамическое торможение возникает в тех случаях, когда якорь двигателя отключается от сети и замыкается на сопротивление динамического торможения Rд.т. Уравнение характеристики (1.6) принимает вид:
n = 
что соответствует семейству прямых 4 (при разных Rд.т), проходящих через начало координат. При переключении в этот режим рабочая точка a1 переходит на одну из характеристик 4, например, в точку a6, а затем перемещается по прямой 4 до нуля. Якорь двигателя тормозится до полной остановки. Изменением сопротивления Rд.т можно регулировать ток якоря и скорость торможения.
 Свойства электродвигателей постоянного тока определяются в основном способом включения обмотки возбуждения. В зависимости от этого различают электродвигатели:
Свойства электродвигателей постоянного тока определяются в основном способом включения обмотки возбуждения. В зависимости от этого различают электродвигатели:
1. с независимым возбуждением : обмотка возбуждения питается от постороннего источника постоянного тока (возбудителя или выпрямителя) ,
2. с параллельным возбуждением : обмотка возбуждения подключена параллельно обмотке якоря,
3. с последовательным возбуждением : обмотка возбуждения включена последовательно с обмоткой якоря,
4. со смешанным возбуждением : он имеет две обмотки возбуждения, одна подключена параллельно обмотке якоря, а другая — последовательно с ней.
Все эти электродвигатели имеют одинаковое устройство и отличаются лишь выполнением обмотки возбуждения. Обмотки возбуждения указанных электродвигателей выполняют так же, как у соответствующих генераторов .
Электродвигатель постоянного тока с независимым возбуждением
В этом электродвигателе (рис. 1, а) обмотка якоря подключена к основному источнику постоянного тока (сети постоянного тока, генератору или выпрямителю) с напряжением U, а обмотка возбуждения — к вспомогательному источнику в напряжением UB. В цепь обмотки возбуждения включен регулировочный реостат Rрв, а в цепь обмотки якоря — пусковой реостат Rn.
Регулировочный реостат служит для регулирования частоты вращения якоря двигателя, а пусковой — для ограничения тока в обмотке якоря при пуске. Характерной особенностью электродвигателя является то, что его ток возбуждения Iв не зависит от тока Iя в обмотке якоря (тока нагрузки). Поэтому, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток двигателя Ф не зависит от нагрузки. Зависимости электромагнитного момента М и частоты вращения n от тока Iя будут линейными (рис. 2, а). Следовательно, линейной будет и механическая характеристика двигателя — зависимость п (М) (рис. 2, б).
При отсутствии в цепи якоря реостата с сопротивлением Rn скоростная и механическая характеристики будут жесткими, т. е. с малым углом наклона к горизонтальной оси, так как падение напряжения IяΣRя в обмотках машины, включенных в цепь якоря, при номинальной нагрузке составляет лишь 3—5 % от Uном. Эти характеристики (прямые 1 на рис. 2, а и б) называются естественными. При включении в цепь якоря реостата с сопротивлением Rn угол наклона этих характеристик возрастает, вследствие чего можно получить семейство реостатных характеристик 2, 3 и 4, соответствующих различным значениям Rn1, Rn2 и Rn3.
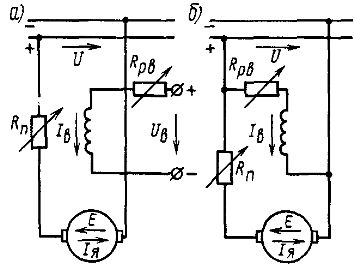
Рис. 1. Принципиальные схемы электродвигателей постоянного тока с независимым (а) и параллельным (б) возбуждением
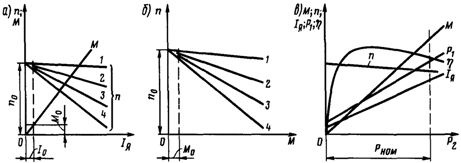
Рис. 2. Характеристики электродвигателей постоянного тока с независимым и параллельным возбуждением : а — скоростные и моментная, б — механические, в — рабочие Чем больше сопротивление Rn, тем больший угол наклона имеет реостатная характеристика, т. е. тем она мягче.
Регулировочный реостат Rpв позволяет изменять ток возбуждения двигателя Iв и его магнитный поток Ф. При этом будет изменяться и частота вращения n.
В цепь обмотки возбуждения никаких выключателей и предохранителей не устанавливают, так как при разрыве этой цепи резко уменьшается магнитный поток электродвигателя (в нем остается лишь поток от остаточного магнетизма) и возникает аварийный режим. Если электродвигатель работает при холостом ходе или небольшой нагрузке на валу, то частота вращения резко возрастает (двигатель идет вразнос). При этом сильно увеличивается ток в обмотке якоря Iя и может возникнуть круговой огонь. Во избежание этого защита должна отключить электродвигатель от источника питания.
Резкое увеличение частоты вращения при обрыве цепи обмотки возбуждения объясняется тем, что в этом случае резко уменьшаются магнитный поток Ф (до значения потока Фост от остаточного магнетизма) и э. д. с. Е и возрастает ток Iя. А так как приложенное напряжение U остается неизменным, то частота вращения n будет увеличиваться до тех пор, пока э. д. с. Е не достигнет значения, приблизительно равного U (что необходимо для равновесного состояния электрической цепи якоря, при котором E= U — IяΣRя.
При нагрузке на валу, близкой к номинальной, электродвигатель в случае разрыва цепи возбуждения остановится, так как электромагнитный момент, который может развить двигатель при значительном уменьшении магнитного потока, уменьшается и станет меньше нагрузочного момента на валу. В этом случае так же резко увеличивается ток Iя, и машина должна быть отключена от источника питания.
Следует отметить, что частота вращения n0 соответствует идеальному холостому ходу, когда двигатель не потребляет из сети электрической энергии и его электромагнитный момент равен нулю. В реальных условиях в режиме холостого хода двигатель потребляет из сети ток холостого хода I0, необходимый для компенсации внутренних потерь мощности, и развивает некоторый момент M0, требуемый для преодоления сил трения в машине. Поэтому в действительности частота вращения при холостом ходе меньше n0.
Зависимость частоты вращения n и электромагнитного момента М от мощности Р2 (рис. 2, в) на валу двигателя, как следует из рассмотренных соотношений, является линейной. Зависимости тока обмотки якоря Iя и мощности Р1 от Р2 также практически линейны. Ток Iя и мощность Р1 при Р2 = 0 представляют собой ток холостого хода I0 и мощность Р0, потребляемую при холостом ходе. Кривая к. п. д. имеет характер, общий для всех электрических машин.
Электродвигатель постоянного тока с параллельным возбуждением
В этом электродвигателе (см. рис. 1, б) обмотки возбуждения и якоря питаются от одного и того же источника электрической энергии с напряжением U. В цепь обмотки возбуждения включен регулировочный реостат Rpв, а в цепь обмотки якоря — пусковой реостат Rп.
В рассматриваемом электродвигателе имеет место, по существу, раздельное питание цепей обмоток якоря и возбуждения, вследствие чего ток возбуждения Iв не зависит от тока обмотки якоря Iв. Поэтому электродвигатель с параллельным возбуждением будет иметь такие же характеристики, как и двигатель с независимым возбуждением. Однако двигатель с параллельным возбуждением работает нормально только при питании от источника постоянного тока с неизменным напряжением.
При питании электродвигателя от источника с изменяющимся напряжением (генератор или управляемый выпрямитель) уменьшение питающего напряжения U вызывает соответствующее уменьшение тока возбуждения Iв и магнитного потока Ф, что приводит к увеличению тока обмотки якоря Iя. Это ограничивает возможность регулирования частоты вращения якоря путем изменения питающего напряжения U. Поэтому электродвигатели, предназначенные для питания от генератора или управляемого выпрямителя, должны иметь независимое возбуждение.
Электродвигатель постоянного тока с последовательным возбуждением
Для ограничения тока при пуске в цепь обмотки якоря включен пусковой реостат Rп (рис. 3, а), а для регулирования частоты вращения параллельно обмотке возбуждения может быть включен регулировочный реостат Rрв.
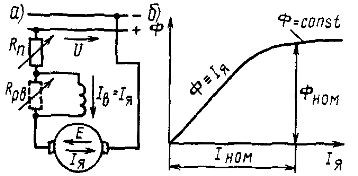
Рис. 3. Принципиальная схема электродвигателя постоянного тока с последовательным возбуждением (а) и зависимость его магнитного потока Ф от тока Iя в обмотке якоря (б)
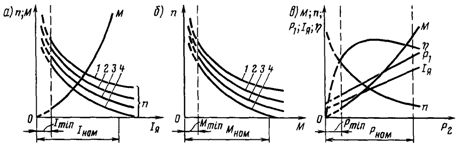
Рис. 4. Характеристики электродвигателя постоянного тока с последовательным возбуждением: а — скоростные и моментная, б — механические, в — рабочие.
Характерной особенностью этого электродвигателя является то, что его ток возбуждения Iв равен или пропорционален (при включении реостата Rpв) току обмотки якоря Iя, поэтому магнитный поток Ф зависит от нагрузки двигателя (рис. 3, б).
При токе обмотки якоря Iя, меньшем (0,8—0,9) номинального тока Iном магнитная система машины не насыщена и можно считать, что магнитный поток Ф изменяется прямо пропорционально току Iя. Поэтому скоростная характеристика электродвигателя будет мягкая — с увеличением тока Iя частота вращения n будет резко уменьшаться (рис. 4, а). Уменьшение частоты вращения n, происходит из-за увеличения падения напряжения IяΣRя. во внутреннем сопротивлении Rя. цепи обмотки якоря, а также из-за увеличения магнитного потока Ф.
Электромагнитный момент М при увеличении тока Iя будет резко возрастать, так как в этом случае увеличивается и магнитный поток Ф, т. е. момент М будет пропорционален току Iя. Поэтому при токе Iя, меньшем (0,8 Н- 0,9) Iном, скоростная характеристика имеет форму гиперболы, а моментная — параболы.
При токах Iя > Iном зависимости М и п от Iя линейны, так как в этом режиме магнитная цепь будет насыщена и магнитный поток Ф при изменении тока Iя меняться не будет.
Механическая характеристика, т. е. зависимость n от М (рис. 4, б), может быть построена на основании зависимостей n и М от Iя. Кроме естественной характеристики 1, можно путем включения в цепь обмотки якоря реостата с сопротивлением Rп получить семейство реостатных характеристик 2, 3 и 4. Эти характеристики соответствуют различным значениям Rn1, Rn2 и Rn3, при этом чем больше Rn, тем ниже располагается характеристика.
Механическая характеристика рассматриваемого двигателя мягкая и имеет гиперболический характер. При малых нагрузках магнитный поток Ф сильно уменьшается, частота вращения n резко возрастает и может превысить максимально допустимое значение (двигатель идет вразнос). Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода и при небольшой нагрузке (различные станки, транспортеры и пр.).
Обычно минимально допустимая нагрузка для двигателей большой и средней мощности составляет (0,2 …. 0,25) Iном. Чтобы предотвратить возможность работы двигателя без нагрузки, его соединяют с приводным механизмом жестко (зубчатой передачей или глухой муфтой), применение ременной передачи или фрикционной муфты недопустимо.
Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют, особенно там, где имеют место изменения нагрузочного момента в широких пределах и тяжелые условия пуска: во всех тяговых приводах (электровозы, тепловозы, электропоезда, электрокары, электропогрузчики и пр.), а также в приводах грузоподъемных механизмов (краны, лифты и пр.).
Объясняется это тем, что при мягкой характеристике увеличение нагрузочного момента приводит к меньшему возрастанию тока и потребляемой мощности, чем у двигателей с независимым и параллельным возбуждением, поэтому двигатели с последовательным возбуждением лучше переносят перегрузки. Кроме того, эти двигатели имеют большой пусковой момент, чем двигатели с параллельным и независимым возбуждением, так как при увеличении тока обмотки якоря при пуске соответственно увеличивается и магнитный поток.
Если принять, например, что кратковременный пусковой ток может в 2 раза превышать номинальный рабочий ток машины, и пренебречь влиянием насыщения, реакцией якоря и падением напряжения в цепи его обмотки, то в двигателе с последовательным возбуждением пусковой момент будет в 4 раза больше номинального (в 2 раза увеличиваются и ток, и магнитный поток), а в двигателях с независимым и параллельным возбуждением — только в 2 раза больше.
В действительности из-за насыщения магнитной цепи магнитный поток не увеличивается пропорционально току, но все же пусковой момент двигателя с последовательным возбуждением при прочих равных условиях будет значительно больше пускового момента такого же двигателя с независимым или параллельным возбуждением.
Зависимости n и М от мощности Р2 на валу электродвигателя (рис. 4, в), как следует из рассмотренных выше положений, являются нелинейными, зависимости P1, Iя и η от Р2 имеют такую же форму, как и у двигателей с параллельным возбуждением.
Электродвигатель постоянного тока со смешанным возбуждением
В этом электродвигателе (рис. 5, а) магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения — параллельной (или независимой) и последовательной, по которым проходят токи возбуждения Iв1 и Iв2 = Iя

где Фпосл — магнитный поток последовательной обмотки, зависящий от тока Iя, Фпар — магнитный поток параллельной обмотки, который не зависит от нагрузки (определяется током возбуждения Iв1).
Механическая характеристика электродвигателя со смешанным возбуждением (рис. 5, б) располагается между характеристиками двигателей с параллельным (прямая 1) и последовательным (кривая 2) возбуждением. В зависимости от соотношения магнитодвижущих сил параллельной и последовательной обмоток при номинальном режиме можно приблизить характеристики двигателя со смешанным возбуждением к характеристике 1 (кривая 3 при малой м. д. с. последовательной обмотки) или к характеристике 2 (кривая 4 при малой м. д. с. параллельной обмотки).
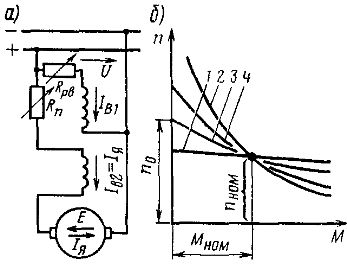
Рис. 5. Принципиальная схема электродвигателя со смешанным возбуждением (а) и его механические характеристики (б)
Достоинством двигателя постоянного тока со смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе, когда Фпосл=0. В этом режиме частота вращения его якоря определяется магнитным потоком Фпар и имеет ограниченное значение (двигатель не идет вразнос).
Двигатель постоянного тока с параллельным возбуждением – это электродвигатель, у которого обмотки якоря и возбуждения подключаются друг к другу параллельно. Часто по своей функциональности он превосходит агрегаты смешанного и последовательного типов в случаях, если необходимо задать постоянную скорость работы.
Характеристики двигателя постоянного тока с параллельным возбуждением
Формула общего тока, идущего от источника, выводится согласно первому закону Кирхгофа и имеет вид: I = Iя + Iв, где Iя — ток якоря, Iв – ток возбуждения, а I – ток, который двигатель потребляет от сети. Следует отметить, что при этом Iв не зависит от Iя, т.е. ток возбуждения не зависит от нагрузки. Величина тока в обмотке возбуждения меньше тока якоря и составляет примерно 2-5% от сетевого тока.
В целом, данные электродвигатели отличаются следующими весьма полезными тяговыми параметрами:
- Высокая экономичность (поскольку ток якоря не проходит через обмотку возбуждения).
- Устойчивость и непрерывность рабочего цикла при колебаниях нагрузки в широких пределах (т.к. величина момента сохраняется даже в случае изменения числа оборотов вала).
При недостаточном моменте пуск осуществляется посредством перехода на смешанный тип возбуждения.
Сферы применения двигателя
Поскольку частота вращения подобных двигателей остается почти постоянной даже при изменении нагрузки, а также может изменяться при помощи регулировочного реостата, они широко применяются в работе с:
- вентиляторами;
- насосами;
- шахтными подъемниками;
- подвесными электрическими дорогами;
- станками (токарными, металлорежущими, ткацкими, печатными, листоправильными и пр.).
Таким образом, этот вид двигателей в основном используется с механизмами, требующими постоянства скорости вращения или ее широкой регулировки.
Регулирование частоты вращения
Регулирование скорости – это целенаправленное изменение скорости электродвигателя в принудительном порядке при помощи специальных устройств или приспособлений. Оно позволяет обеспечить оптимальный режим работы механизма, его рациональное использование, а также уменьшить расход энергии.
Существует три основных способа регулирования скорости двигателя:
- Изменение магнитного потока главных полюсов. Осуществляется при помощи регулировочного реостата: при увеличении его сопротивления магнитный поток главных полюсов и ток возбуждения Iв уменьшаются. При этом увеличивается число оборотов якоря на холостом ходу, а также угол наклона механической характеристики. Жесткость механических характеристик сохраняется. Однако увеличение скорости может привести к механическим повреждениям агрегата и к ухудшению коммутации, поэтому не рекомендуется увеличивать частоту вращения этим методом более чем в два раза.
- Изменение сопротивления цепи якоря. К якорю последовательно подключается регулировочный реостат. Скорость вращения якоря уменьшается при увеличении сопротивления реостата, а наклон механических характеристик увеличивается. Регулировка скорости вышеуказанным способом:
- способствует уменьшению частоты вращения относительно естественной характеристики;
- связана с большой величиной потерь в регулировочном реостате, следовательно, неэкономична.
- Безреостатное изменение подаваемого на якорь напряжения. В этом случае необходимо наличие отдельного источника питания с регулируемым напряжением, например, генератора или управляемого вентиля.
Двигатель с независимым возбуждением
Двигатель постоянного тока независимого возбуждения как раз и реализует третий принцип регулирования скорости. Его отличие в том, что обмотка возбуждения и магнитное поле главных полюсов подключаются к разным источникам. Ток возбуждения является неизменной характеристикой, а магнитное поле меняется. При этом изменяется число оборотов вала на холостом ходу, жесткость характеристики остается прежней.
Таким образом, принцип работы дпт с независимым возбуждением является достаточно сложным вследствие независимой работы двух источников, тем не менее, его главное преимущество – большая экономичность.